【PR】SeqGAN: Sequence Generative Adversarial Nets with Policy Gradient
12 Jun 2020
Reading time ~2 minutes
SeqGAN: Sequence Generative Adversarial Nets with Policy Gradient, Lantao Yu et al.
直接使用GAN生成序列主要有两个方面的问题:
- GAN适用于生成连续型的而非离散型的数据(如文本序列)。传统的基于Seq2Seq框架的RNN模型,在进行输出的时候,先通过softmax层输出一个vocab_size维度大小的概率分布,再经过argmax sampling得到one-hot vector找到对应词的index。而基于梯度优化后的参数在分布上的微小改变对于直接输入给Discriminator的one-hot vector是无效的。Generator无法做出改进。具体解释参见 [1] 2.2
- GAN难以对不完整的生成序列进行判别。
对于GAN解决离散数据的问题:
-
一种思路是对GAN的计算方式做出调整。Wasserstein-GAN提出用Earth mover’s distance (Wasserstein Metric) 替代JS-Divergence作为真实样本和生成样本分布的度量 [2]。JS-Divergence在两个分布重合部分可忽略不计的情况下(即训练前期)接近常数,无法给出梯度。而Wasserstein Metric的输出要更为平滑 [3]。这样以来,使用WGAN,Discriminator可以直接对比Generator softmax层输出的概率分布和真实样本的one-hot vector,至少在实验中可以生成相对有意义的结果了 [4]。另一种方式将softmax改为gumbel-softmax,其输出可以逼近argmax sampling的输出,从而尽可能的保证分布的重叠 [5]。
-
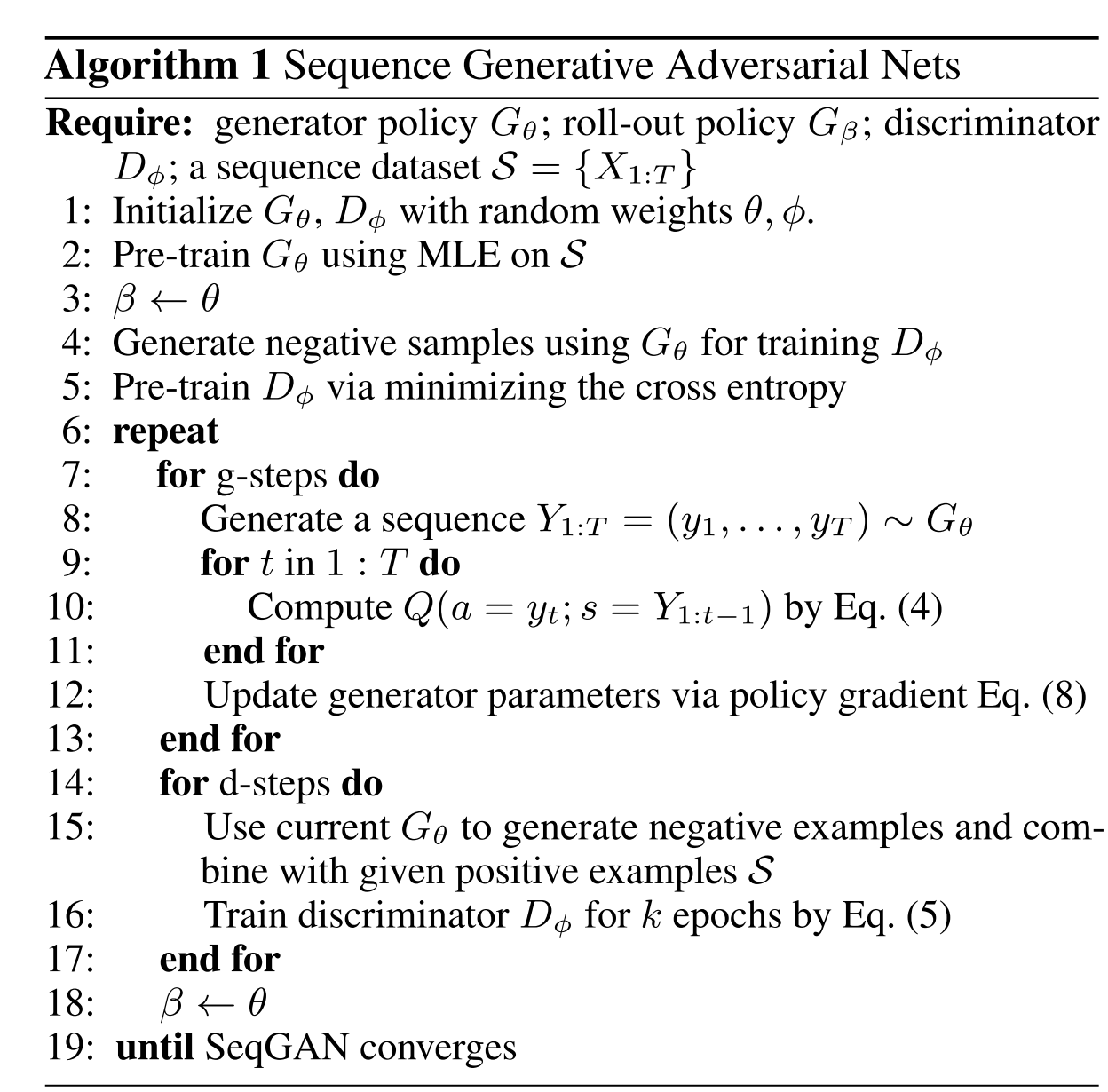
文章作者采取的办法是将Discriminator作为Reward的来源,对Generator做policy gradient [6]。
-

-
Train a \(\theta\)-parameterized generative model \(G_{\theta}\) to produce a sequence,
\(Y_{1: T}=\left(y_{1}, \ldots, y_{t}, \ldots, y_{T}\right), y_{t} \in \mathcal{Y}\) (the vocabulary of candidate tokens)
Train a \(\phi\)-parameterized discriminative model \(D_{\phi}\) to provide a guidance
\(D_{\phi}(Y_{1:T})\) - how likely \(Y_{1:T}\) is from real data or not
-
From the perspective of RL, in timestep \(t\),
State - \(s = \left(y_{1}, \ldots, y_{t-1}\right)\)
Action - \(a = y_{t}\)
Policy - \(G_{\theta}\left(y_{t} \mid Y_{1: t-1}\right)\)
State Transition is deterministic after an action has been chosen, \(\delta_{s, s^{\prime}}^{a}=1\) for the next state \(s^{\prime} = Y_{1:t}\), if \(s = Y_{1:t-1}\) and \(a = y_{t}\)
-
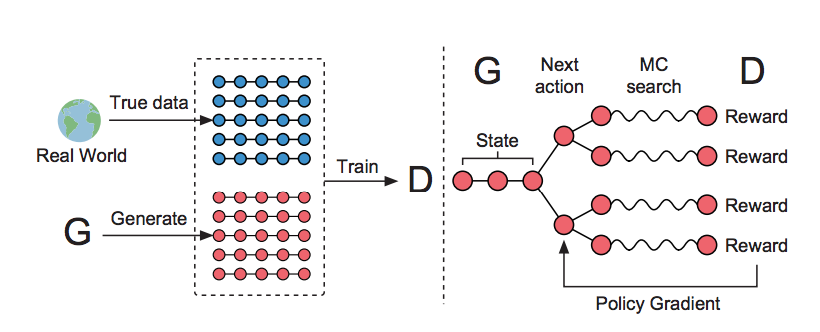
\(D_{\phi}\) is trained by providing the real sequence data and the synthetic sequences generated from \(G_{\theta}\)
\(G_{\theta}\) is updated by policy gradient and MC search on the expected end reward from \(D_{\phi}\)
The reward is estimated by \(D_{\phi}(Y_{1:T})\)
-
-
Generator’s objective and Policy Gradient
\[J(\theta)=\mathbb{E}\left[R_{T} | s_{0}, \theta\right]=\sum_{y_{1} \in \mathcal{Y}} G_{\theta}\left(y_{1} | s_{0}\right) \cdot Q_{D_{\phi}}^{G_{\theta}}\left(s_{0}, y_{1}\right)\] \[\nabla_{\theta} J(\theta)=\sum_{t=1}^{T} \mathbb{E}_{Y_{1: t-1} \sim G_{\theta}}\left[\sum_{y_{t} \in \mathcal{Y}} \nabla_{\theta} G_{\theta}\left(y_{t} | Y_{1: t-1}\right) \cdot Q_{D_{\phi}}^{G_{\theta}}\left(Y_{1: t-1}, y_{t}\right)\right]\] \[\theta \leftarrow \theta+\alpha_{h} \nabla_{\theta} J(\theta)\] -
采用Monte Carlo Search计算的Reward (action-value function)
\(Q_{D_{\phi}}^{G_{\theta}}\left(s, a\right)\) is the action-value function of a sequence, i.e. the expected accumulative reward starting from state s, taking action a, and then following policy.
由于Discriminator只能对完整生成的序列计算reward,因此在序列生成过程中的每一步(\(t \lt T\)),都使用一个roll-out policy \(G_{\beta}\)生成\(N\)个完整的长度为\(T\)的序列,用于估计当前部分生成的序列的reward。
\[Q_{D_{\phi}}^{G_{\theta}}\left(s=Y_{1: t-1}, a=y_{t}\right)=\] \[\left\{\begin{array}{ll}\frac{1}{N} \sum_{n=1}^{N} D_{\phi}\left(Y_{1: T}^{n}\right), Y_{1: T}^{n} \in \mathrm{MC}^{G_{\beta}}\left(Y_{1: t} ; N\right) \text { for } t \lt T \\ D_{\phi}\left(Y_{1: t}\right) \text { for } t=T\end{array}\right.\] -
Discriminator’s objective
\[\min_{\phi}-\mathbb{E}_{Y \sim p_{\text {data }}}\left[\log D_{\phi}(Y)\right]-\mathbb{E}_{Y \sim G_{\theta}}\left[\log \left(1-D_{\phi}(Y)\right)\right]\] -
The Generative Model for Sequences - RNNs (Seq2Seq)
-
The Discriminative Model for Sequences - Sentence-based CNN
-
-
[1] Role of RL in Text Generation by GAN(强化学习在生成对抗网络文本生成中扮演的角色)
[2] Wasserstein GAN
[4] Improved Training of Wasserstein GANs
[5] Categorical Reparameterization with Gumbel-Softmax
[6] SeqGAN: Sequence Generative Adversarial Nets with Policy Gradient